Remotely controlling a robot to harvest strawberries from Tokyo to Akita NTT, NTT East, and NTT Agri Technology
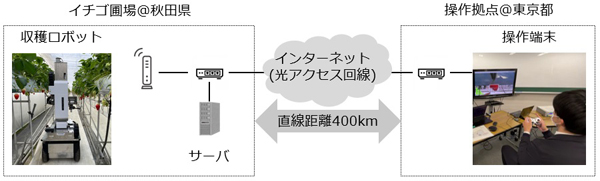
NTT, NTT East, and NTT Agri Technology conducted a demonstration experiment in which a harvesting robot in farmland was remotely controlled over a network (a straight-line distance of about 400 km between Akita and Tokyo) to harvest strawberries. In the demonstration experiment, it was confirmed that remote harvesting work can be performed while maintaining high operability through real-time operation control according to the quality of the network. This will enable remote operation not only in the agricultural industry but also in various other situations, helping to alleviate labor shortages.
An environment was created in which a harvesting robot operator in Tokyo remotely controls a robot that harvests strawberries in farmland in Akita Prefecture while watching camera footage transmitted over the network. An image processing server determines whether the strawberries are suitable for harvesting from the footage captured by the harvesting robot’s camera and adds the result to the footage. The operator watches the footage displayed on a monitor showing information on whether the harvest is suitable, and remotely controls the robot to harvest strawberries in Akita.
※Translating Japanese articles into English with AI